波塞利耶-利普金机械
波塞利耶-利普金机械是xxx个真正的平面直线机构——xxx个能够将旋转运动转化为完美直线运动的平面连杆机构,反之 反之亦然。
在本发明之前,没有参考导轨,不存在将精确的直线运动转换为圆周运动的平面方法。 1864 年,所有动力都来自蒸汽机,蒸汽机有一个活塞在汽缸中上下直线运动。 该活塞需要与气缸保持良好的密封以保留驱动介质,并且不会因泄漏而损失能量效率。 活塞通过保持垂直于气缸的轴线并保持其直线运动来做到这一点。 将活塞的直线运动转换为圆周运动至关重要。 大多数这些蒸汽机的应用都是旋转的。
早期的萨鲁斯连锁
有一种更早的直线机制,其历史并不为人所知,称为 Sarrus linkage。 这种连杆比 Peaucellier-Lipkin 连杆早了 11 年,由一系列铰接的矩形板组成,其中两个保持平行,但可以正常地相互移动。 Sarrus 的连杆机构属于三维类,有时称为空间曲柄,这与平面机构的 Peaucellier-Lipkin 连杆机构不同。
几何
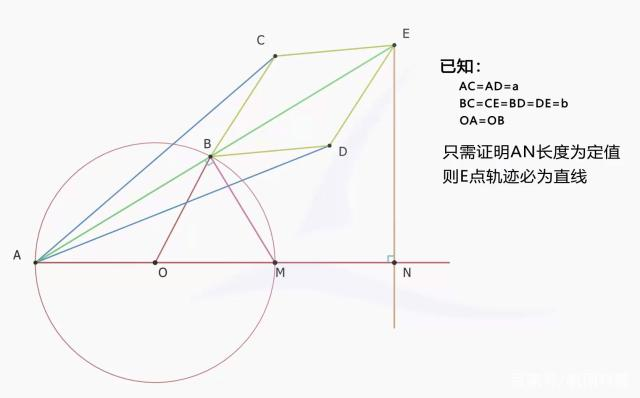
在仪器的几何图中,可以看到六个固定长度的杆:OA、OC、AB、BC、CD、DA。 OA的长度等于OC的长度,AB、BC、CD、DA的长度都相等,构成一个菱形。 另外,O点是固定的。 然后,如果 B 点被约束沿着穿过 O 的圆移动,则点 D 将必然必须移动 沿着一条直线。 另一方面,如果 B 点被迫沿直线移动,则 D 点必然必须沿圆移动。
概念的数学证明
反点
令点 P 为直线 AC 和 BD 的交点。 那么,由于 ABCD 是菱形,P 是线段 BD 和 AC 的中点。 因此,长度BP = 长度PD。
三角形△BPA全等三角形△DPA,因为边BP全等边DP,边AP全等于自身,边AB全等边AD。 因此,角∠BPA = 角∠DPA。 但由于∠BPA + ∠DPA = 180°,则2 × ∠BPA = 180°,∠BPA = 90°,∠DPA = 90°。
由于OA和AD都是固定长度,那么OB和OD的乘积是一个常数:
ℓ O B ⋅ ℓ O D = k 2
并且由于点 O、B、D 共线,则 D 是 B 的倒数。