史密斯预测器
词条百科 1
史密斯预测器(由 O. J. M. Smith 于 1957 年发明)是一种预测控制器,旨在控制具有显着反馈时间延迟的系统。 这个想法可以说明如下。
假设设备由 G ( z ) {displaystyle G(z)} 后跟一个纯时间延迟 z − k {displaystyle z{-k}} 组成。 z {displaystyle z} 指的是与植物 G {displaystyle G} 的输入和输出相关的传递函数的 Z 变换。
作为xxx步,假设我们只考虑 G ( z ) {displaystyle G(z)}(没有延迟的对象)并设计一个控制器 其中 G ( z ) {displaystyle G(z)} 已经改为 G ^ ( z ) {displaystyle {hat {G}}(z)} 表明它是控制器使用的模型。
请注意,有两个反馈回路。 像往常一样,外部控制回路将输出反馈回输入。
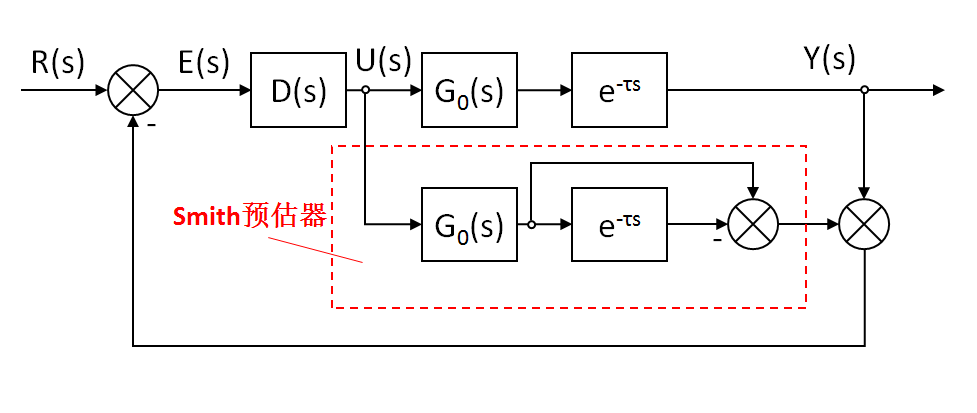
然而,由于延迟,仅此循环无法提供令人满意的控制; 这个循环正在反馈过时的信息。 直观地,对于没有新信息可用的 k 个采样间隔,系统由内环控制,内环包含一个预测器,预测工厂 G 当前的(不可观察的)输出是什么。
要检查这是否有效,可以按如下方式进行重新安排:
在这里我们可以看到,如果控制器中使用的模型 G ^ ( z ) z − k {displaystyle {hat {G}}(z)z{-k}} 与植物 G ( z ) z − k {displaystyle G(z)z{-k}} 完美,然后外部和中间反馈回路相互抵消,控制器产生正确的控制动作。
内容来源于网络,本内容不代表16map.com立场,内容投诉举报请联系16map.com客服。如若转载,请注明出处:https://16map.com/wiki/nmjeai4loitq
