姿势(计算)
目录
姿势(计算)
在计算和计算机视觉领域,姿势(或空间姿势)表示一个物体的位置和方向,通常是三维的。姿态通常在内部被存储为变换矩阵。姿势”一词在很大程度上与”变换”一词同义,但变换通常包括比例,而姿势则不包括。在计算机视觉中,物体的姿态通常是通过姿态估计的过程从相机输入中估计出来的。然后,这一信息可以被用来,例如,让机器人操纵一个物体,或者根据它在环境中的感知位置和方向避免移动到该物体上。
姿势估计
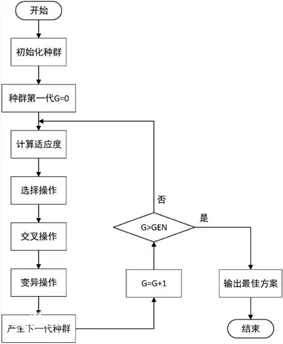
确定物体在图像(或立体图像、图像序列)中的姿势的具体任务被称为姿势估计。姿势估计问题可以通过不同的方式解决,这取决于图像传感器的配置和方法的选择。可以区分出三类方法。分析或几何方法。鉴于图像传感器(相机)已被校准,场景中的三维点和图像中的二维点的映射关系是已知的。如果物体的几何形状也是已知的,这意味着物体在摄像机图像上的投影是物体姿势的一个众所周知的函数。一旦确定了物体上的一组控制点,通常是角或其他特征点,就有可能从一组方程中解决姿势变换问题,这些方程将点的三维坐标与它们的二维图像坐标联系起来。确定一个点云相对于另一个点云的姿势的算法被称为点集注册算法,如果点之间的对应关系还不知道的话。遗传算法方法。如果一个物体的姿势不需要实时计算,可以使用遗传算法。这种方法是稳健的,特别是在图像没有被完美校准的情况下。在这种特殊情况下,姿态代表遗传表征,物体控制点与图像的投影之间的误差是健身函数。基于学习的方法。这些方法使用基于人工学习的系统,学习从二维图像特征到姿势变换的映射。
简而言之,这意味着在学习阶段,必须向系统提供足够多的不同姿态的物体图像。一旦学习阶段完成,系统应该能够在给定物体图像的情况下提出对物体姿态的估计。相机姿态相机切除是估计针孔相机模型参数的过程,该模型近似于产生给定照片或视频的相机;它确定哪条入射光线与所产生图像的每个像素相关。基本上,这个过程决定了针孔摄像机的姿势。通常,相机参数在一个3×4的投影矩阵中表示,称为相机矩阵。外在参数定义了相机的姿势,而内在参数指定了相机图像格式。这个过程通常被称为几何相机校准或简单的相机校准,尽管这个术语也可以指光度学相机校准或只限于内在参数的估计。外部方向和内部方向分别指的是只确定外在参数和内在参数。经典的相机校准需要场景中的特殊物体,而在相机自动校准中则不需要。摄像机切除法经常用于立体视觉的应用中,两个摄像机的投影矩阵被用来计算两个摄像机所看到的一个点的三维世界坐标。